 Product 5.4
Product 5.4 Automation of Winter Pruning of Grapevines
In this project, we developed a system to automate winter vine pruning using advanced robotics, enhancing viticultural efficiency and wine quality.
The winter pruning system identifies the correct pruning points of a spur pruned vine that respect the agronomic rules and executes the cut thanks to a robotic manipulator (contribution IIT- DLS). This modular solution has been mounted on different mobile platforms, including one equipped with autonomous navigation software developed by InfoSolution.


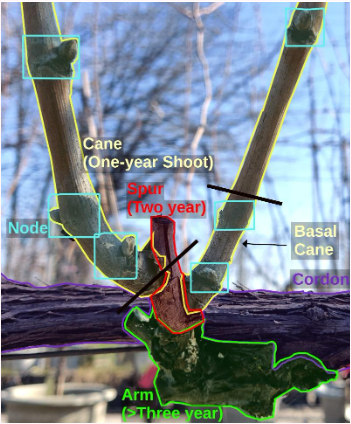
However, perception systems face different difficulties in outdoor environments, such as shadow effects, varying light conditions, occlusions, and reflections, making it challenging to understand the entire plant structure from a single perspective. Therefore, collecting and integrating information from different perspectives is suitable for addressing the mentioned difficulties. By merging all the segmented images, we can obtain a 3D model of each plant.
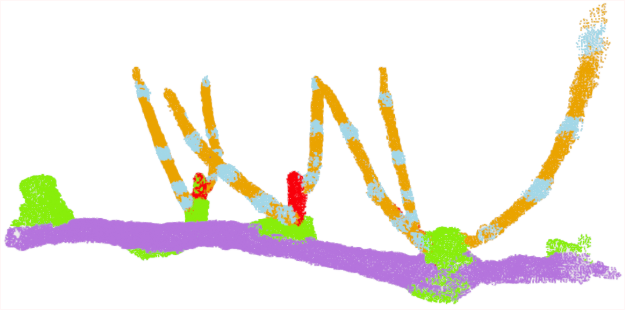
Pruning points are obtained by applying a set of rules – defined by agriculture experts – to a few metrics extracted by the model. An example of pruning point generation (blue planes in the right image) is shown in [2] and is reported below.

Finally the manipulation module controls the motion of the arm in order to reach the target point and avoiding collisions with other part of the plant [3]

Info Solution Contribution – Autonomous Vineyard Navigation for Robotic Winter Pruning
Within Product 5.4, Info Solution developed and validated the autonomous vineyard navigation system that enables a mobile robotic platform to operate safely and efficiently inside vine rows while transporting and positioning the robotic pruning arm developed by IIT.
While the manipulator performs agronomically guided cuts, the overall performance of the system depends on stable, precise, and fully autonomous mobility. Reliable navigation is what transforms a robotic arm into a complete robotic pruning platform for precision viticulture.
The navigation challenge in vineyards
Vineyards are structured but highly variable environments. Plant growth, seasonal changes, and partial occlusions make static maps unreliable and purely reactive approaches unstable.
An effective LiDAR-based agricultural navigation system must:
- Remain centered between rows
- Maintain smooth, predictable motion
- Detect the end of each row reliably
- Execute controlled and repeatable turning maneuvers
- Continue operation without human intervention
These capabilities are essential not only for mobility, but also to guarantee pruning accuracy, plant safety, and operational efficiency.
The MOLIRIS navigation approach
To address these challenges, Info Solution deployed and adapted its MOLIRIS autonomous navigation system specifically for vineyard environments.
The system uses multi-LiDAR perception to reconstruct vineyard geometry in real time. Rather than reacting to local irregularities in branches or foliage, MOLIRIS analyzes the overall structure of the vegetation and computes a stable reference trajectory aligned with the row.
This approach enables:
- Smooth and linear row-following
- Reduced oscillations and trajectory instability
- Reliable end-of-row detection
- Efficient and repeatable turning behavior
The result is consistent motion that closely replicates the behavior of an experienced operator, while ensuring repeatability and scalability for precision viticulture robotics.
Coordinated pruning workflow
During operation, the robotic arm governs task progression: once pruning of a vine is completed, the arm commands the autonomous rover to advance to the next plant. This synchronized interaction ensures accurate positioning, continuous workflow, and optimized productivity along the row.
Field validations in operational vineyards confirmed reliable autonomous row-following, stable integration between navigation and manipulation, and consistent performance in real agricultural conditions.
From research to deployable technology
The navigation architecture developed within Product 5.4 is modular and designed for integration with compatible mobile robotic platforms, enabling adoption by agricultural machinery manufacturers, robotics companies, and system integrators interested in autonomous vineyard navigation solutions.
This work reinforces the broader MOLIRIS framework developed by Info Solution and demonstrates its suitability for scalable, industrial-grade robotic pruning and precision agriculture applications.Further information about the MOLIRIS autonomous navigation system is available at:
https://infosolution.it/en/ready-to-use-autonomous-robots/
Summary of the project and the achieved results are visible here:
References:
[1] : P. Guadagna, M. Fernandes, F. Chen, A. Santamaria, T. Teng, T. Frioni, D. G. Caldwell, S. Poni, C. Semini, M. Gatti, Using deep learning for pruning region detection and plant organ segmentation in dormant spur-pruned grapevines, Precision Agriculture, 2023, https://link.springer.com/article/10.1007/s11119-023-10006-y
[2] : M. Fernandes, J. D. Gamba, F. Pelusi, A. Bratta, D. G. Caldwell, S. Poni, M. Gatti, C. Semini, Grapevine winter pruning: Merging 2D segmentation and 3D point clouds for pruning point generation, Computers and Electronics in Agriculture, 2025, https://www.sciencedirect.com/science/article/pii/S0168169925006957
[3]: M. Andreotti, M. Fernandes, A. Bratta, V. Barasuol, C. Semini, APF-Based Control with Vortex Fields for Precise Robotic Manipulation in Grapevine Winter Pruning, Italian Conference on Robotics and Intelligent Machines (I-RIM) 3D, 2025,