 Product 5.3
Product 5.3 Quadruped Robot for Litter Collection on Beaches and Small Alleys
In this product, we have developed two demonstrators to perform litter collection with a quadruped robot.
Vacuum-Cleaner-Equipped Robot (VERO), IIT – Dynamic Legged Systems lab.
The core idea is to exploit the natural mobility of a quadruped to collect cigarette butts (CB), the second most common undisposed waste worldwide, autonomously in terrains that are hard to reach for wheeled and tracked robots. The system is based on robotics and AI and represents an example of how these technologies can be applied in our society.

The quadruped is a commercial product (Aliengo of Unitree) to whose legs are attached nozzles to suck the CBs. The vacuum cleaner is placed on the robot’s torso in the white payload, along with the computer that controls the motion. Two cameras are mounted on the robot: a forward-facing camera on the front of the robot and a downward-facing camera on the bottom of the robot’s trunk. The former is used to map the objects on the ground to be collected (and thus the optimal path to reach them); the latter provides information for a visual servoing procedure to achieve precise footstep placement. Indeed, the goal is to find the optimal poses that the robot should have when placing the nozzle on top of the CBs. After the vacuum cleaner is turned on and the CB is collected, the locomotion can continue to the next CB on the ground.
VERO was tested in outdoor scenarios, including beaches, small alleys, uneven terrain, parks, and playgrounds.
Collection with arm: IIT – Dynamic Legged Systems lab, IIT – Soft BioRobotics Perception
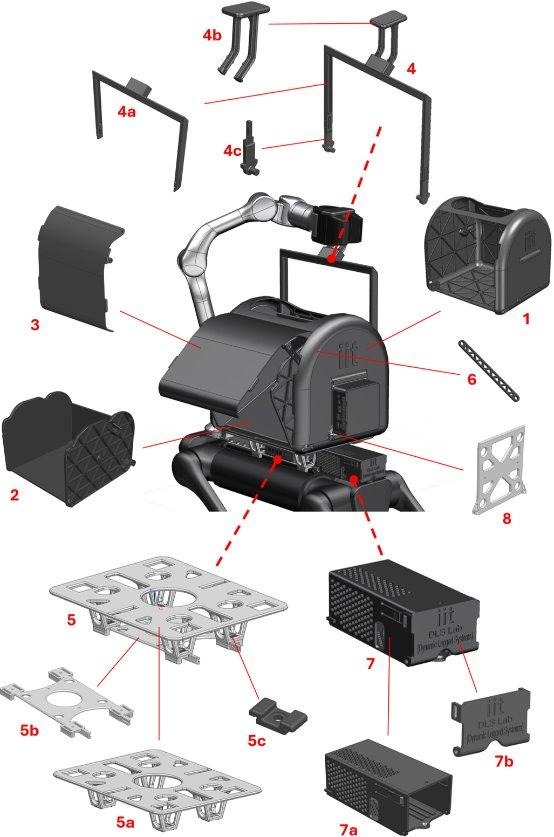
In the second demonstrator, we focus on bigger litters. In this case, the collection method is not sucking but using a manipulator, as in the image above. Instead of the vacuum cleaner, Aliengo is carrying a custom-made basket, which guarantees the possibility for the arm to autonomously
In the second demonstrator, we focus on bigger litters. In this case, the collection method is not sucking but using a manipulator, as in the image above. Instead of the vacuum cleaner, Aliengo is carrying a custom-made basket, which guarantees the possibility for the arm to autonomously place the objects and empty the basket itself by pulling the handle. A Unitree Z1-Pro arm is attached to the front.
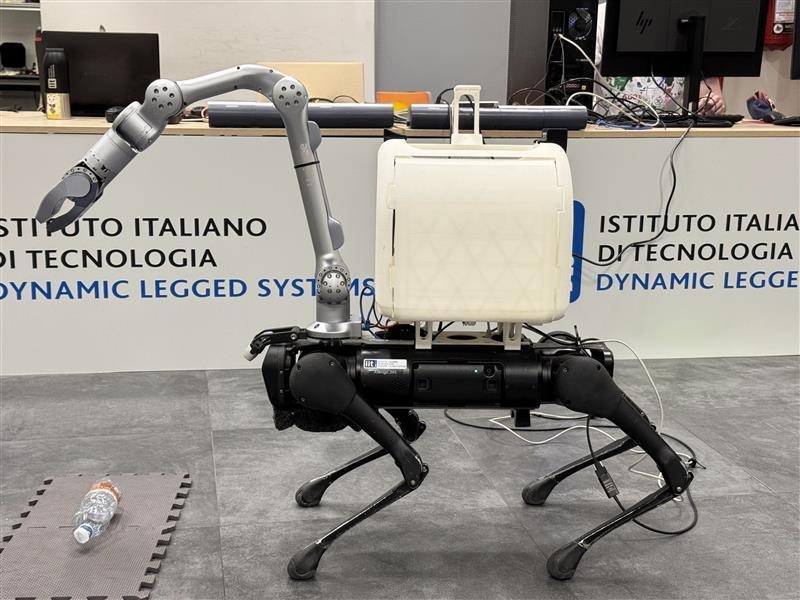
With respect to VERO, the locomotion module is adapted to account for the different weights and the arm’s motion, which can create stability issues. The detection module provides the position and orientation of the objects to be collected, and an Inverse Kinematics module controls the arm to reach the target. The system is made of commercial products, but, to increase robustness and reliability, it is fundamental to adapt them to the current task. In particular, preliminary experiments demonstrated the need to control the grasping to prevent overheating of the gripper. For this reason, the group IIT-SBRP developed a sensorized sleeve that provides feedback on the grasping condition and ensures the object is collected correctly.
References:
[1] L. Amatucci, G. Turrisi, A. Bratta, V. Barasuol, C. Semini, VERO: A Vacuum-cleaner-Equipped Quadruped RObot for Efficient Litter Removal, Journal of Field Robotics, 2024,
https://onlinelibrary.wiley.com/doi/full/10.1002/rob.22350
[2] A. Rad, M. Villa, A. Bratta, M. Zoppi, C. Semini, Design of a Container Mechanism for Trash Collection on Quadruped Robots, 20th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), 2024,