 Product 5.8
Product 5.8 Long reach robotic arm
Lory-5jp design and actuation
Structural Design and Fabrication Methodology
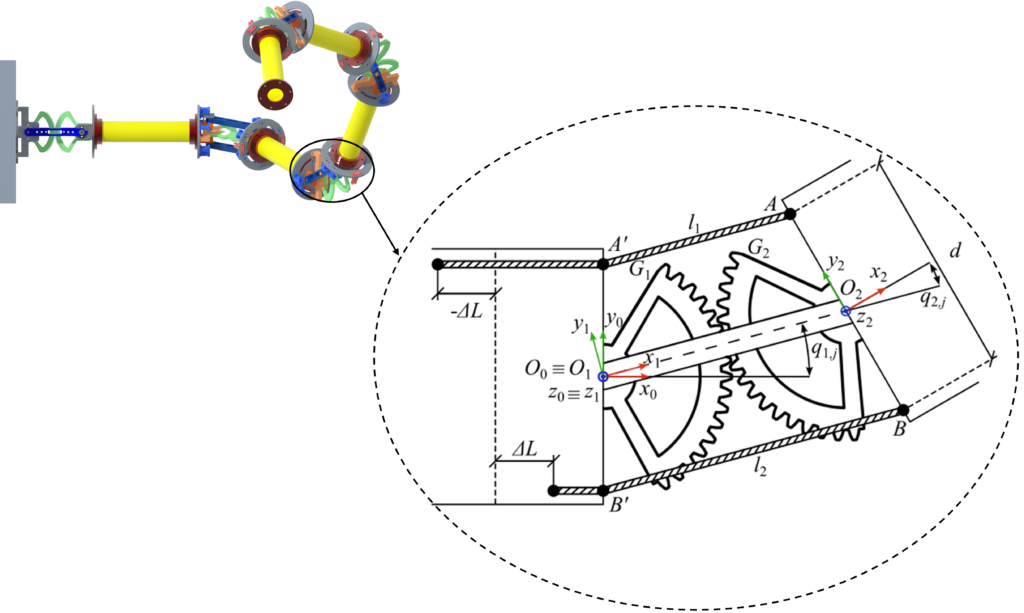
The lory 5jp is a modular hyper redundant manipulator. five serial joints constitute the 1 m total length. sls produces the primary structural components. this additive manufacturing technique uses pa12 nylon powder. the process creates complex internal geometries. these geometries include integrated tendon paths and sensor housings. this approach avoids manual assembly errors. each module features a gear based joint architecture, as shown in figure 1. this mechanical design maintains a constant sum for antagonistic tendon lengths. the arrangement prevents tension loss during rotation. the constant length constraint simplifies control.
The manipulator outer diameter is 130 mm. This sizing allows sixteen tendon passages. Such capacity supports up to eight joints in future versions. Tendon passages contain 4 mm holes. Low friction POM C bushings line these conduits. This is illustrated in figure 2. High strength Zylon fibers compose the tendons. These fibers offer high tensile modulus. Structural analysis identifies a maximum stress of 32.9 MPa. This value falls below the material yield strength.
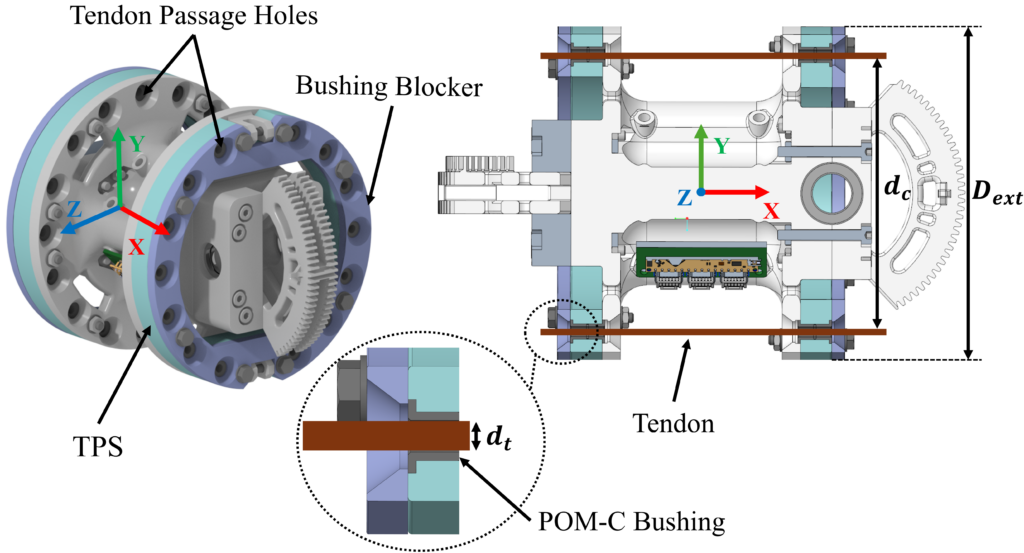
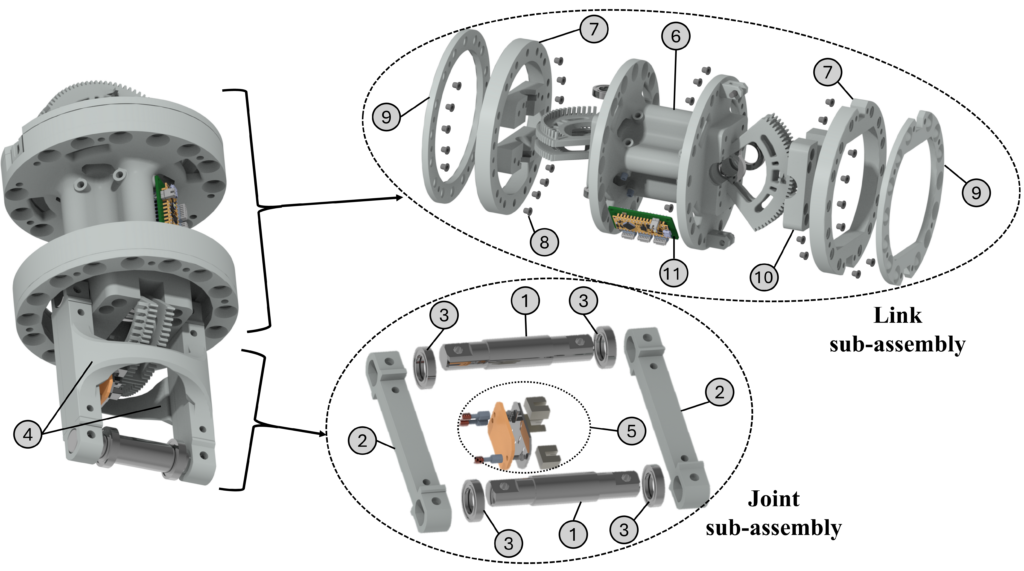
Figure 2 – A rendered view of a single module of the robot and its internal components (left) and an exploded view of one module (right)
Electronic Sensing and Distributed Logic
The sensing system incorporates TCST1300 transmissive optical sensors. These components monitor gear rotation. Each sensor contains an infrared LED and a phototransistor. A 0.25 mm optical slit provides high spatial resolution. Two sensors per joint module form a quadrature encoder. An additional sensor provides a zero-reference index. This configuration ensures absolute position feedback. The sensor implementation into the robot joint is shown in figure 3.
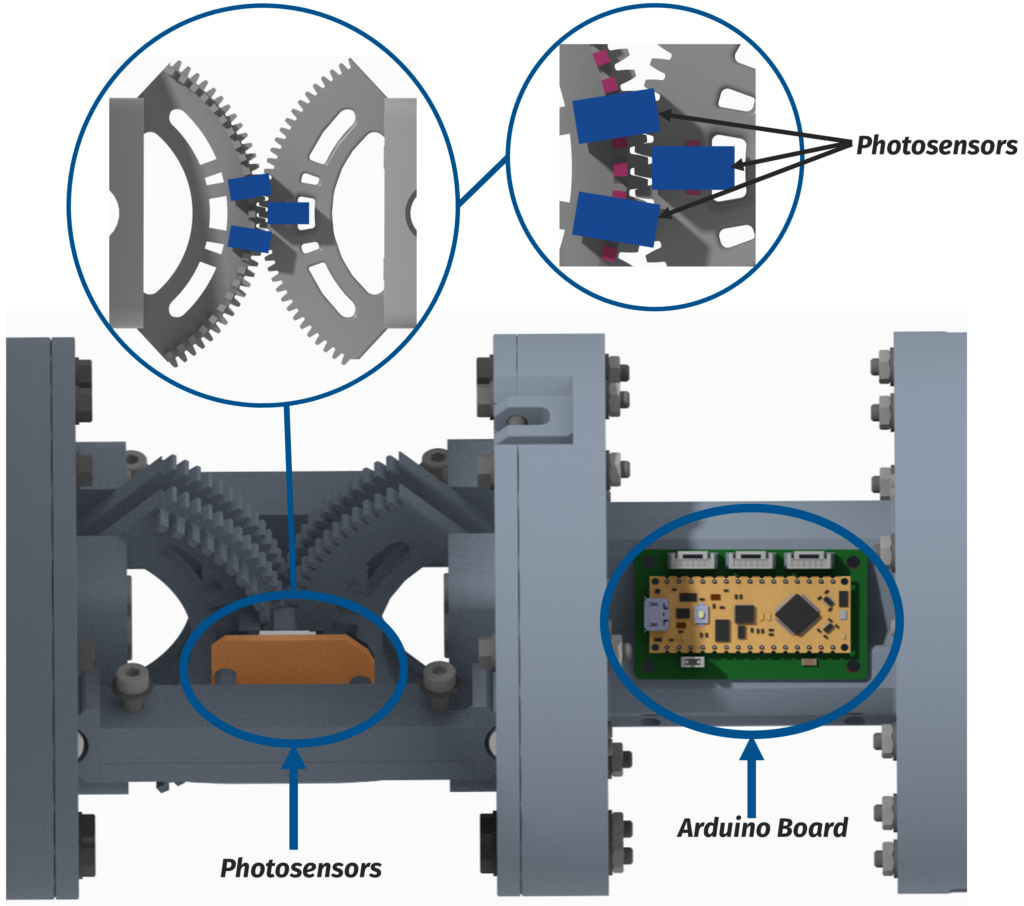
The control logic follows a distributed architecture. Five Arduino Nano boards manage local joint sensing. These microcontrollers communicate using a 1 MHz SPI bus. A daisy chain communication protocol minimizes cable requirements. This reduction is important for hyper redundant systems. An NI CompactRIO performs as the master device. This controller manages high speed data acquisition. Common power lines distribute 5V to each joint.
Actuation System
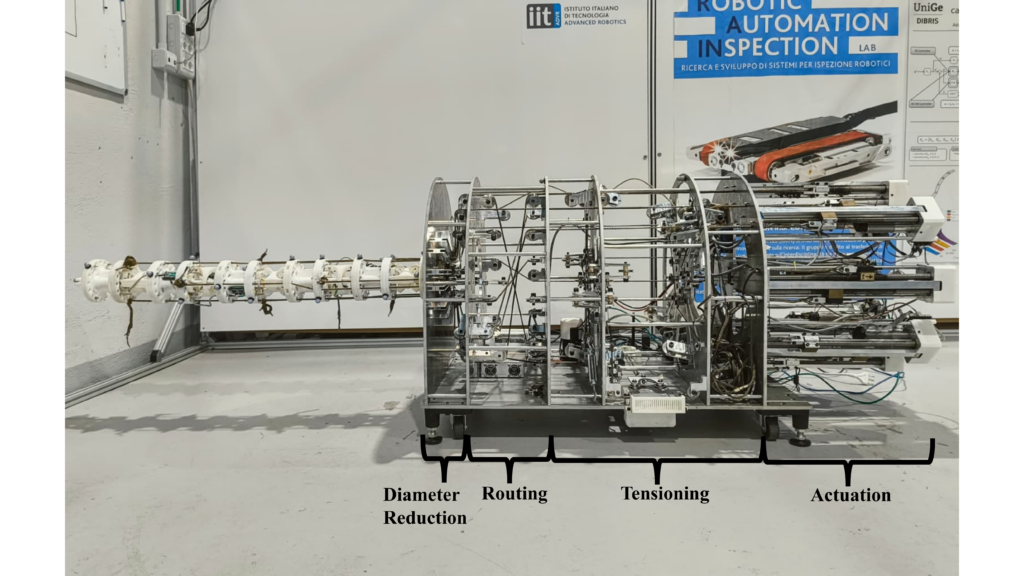
The actuation unit sits outside the operational workspace. This placement minimizes the moving mass of the robot. Eight Maxon DCX35L brushed motors provide the driving force. These motors connect to ball screw linear actuators. Each actuator offers a 310 mm stroke. A 26 to 1 planetary gearhead increases the torque. An external 1.5 to 1 reduction stage further improves force delivery. The system generates a nominal push force of 1.98 kN. Maxon EPOS4 drivers regulate each motor. These drivers execute current and velocity loops. The control frequency operates at 2.5 kHz. Communication uses the CANopen protocol over a CAN bus. This industrial standard provides robust data transfer. The unit includes four distinct stages. These stages are actuation, tensioning, routing, and diameter reduction, as shown in fugure 3. The routing stage guides tendons from the linear actuators to the robot base.
Active Global Tensioning and Stiffness Control
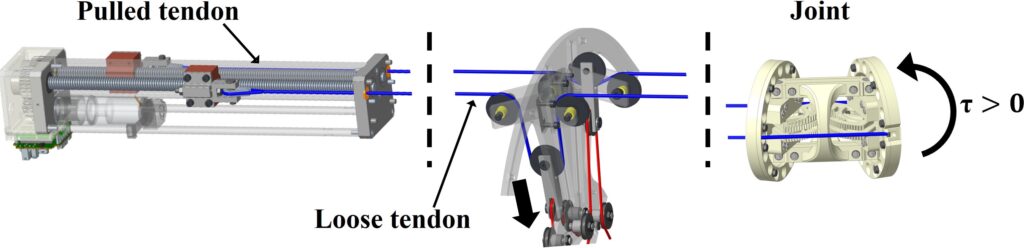
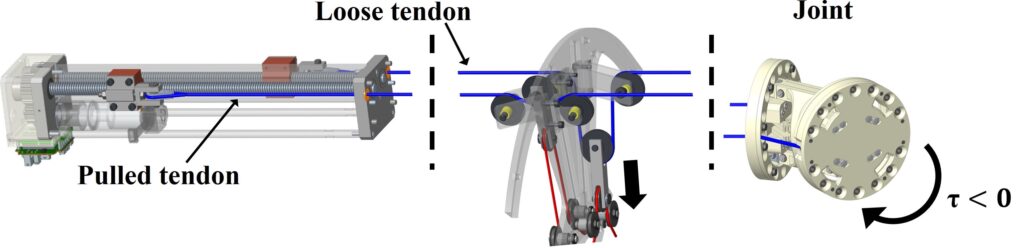
The LORY 5JP uses an active global tensioning system. This design replaces conventional static preloads. The working principle is shown in figure 4. A single motor controls the tensioning cable. This cable acts on internal sliders. Sliders move to maintain tension in slack lines. This mechanism ensures tendons remain taut during all maneuvers. The sliders balance forces between actuation and tensioning lines.
This arrangement also allows real time stiffness modulation. Increasing the global tension scales the overall robot stiffness. Tip translational stiffness increases fourfold when tension rises to 300 N. This capability allows the manipulator to adapt to varying load conditions. The system reduces compressive structural loads during low force tasks.
Performance Analysis
Experimental data quantifies the system efficiency. Static tension efficiency measures 37.1 %. Dynamic efficiency reaches 65.9 %. Lower dynamic friction facilitates smoother tracking. Optimal operation occurs with tensioner forces between 50 N and 100 N. Forces above 200 N degrade tracking accuracy. The tensioning system performance in static and dynamic conditions, as well as the stiffness modulation were assessed through an extensive experimental campaign.
The published articles regarding this project and related to it, are the following:
- Conference Paper – ADM
Poka, A., Ludovico, D., Manara, F., De Mari Casareto Dal Verme, L., Canali, C., Berselli, G., & Caldwell, D. G. (2025).
Automation of the structural analysis on a robot link via scripting in Ansys Workbench: A tutorial. ADM Conference. - Journal Article – Ocean Engineering (Elsevier)
Poka, A., Ludovico, D., Manara, F., De Mari Casareto Dal Verme, L., Canali, C., Berselli, G., Caldwell, D. G., & Jovanova,
J. (2025). Design of a lightweight and slender hyper-redundant manipulator for underwater applications. Ocean Engineering,
342, 122800. https://doi.org/10.1016/j.oceaneng.2025.122800 - Conference Paper – IEEE/ASME AIM
Poka, A., Ludovico, D., Manara, F., De Mari Casareto Dal Verme, L., Canali, C., Berselli, G., & Caldwell, D. G. (2025).
Structural optimisation of a cable-driven hyper-redundant manipulator. In Proceedings of the IEEE/ASME International
Conference on Advanced Intelligent Mechatronics (AIM). IEEE. https://doi.org/10.1109/AIM64088.2025.11175840 - Journal Article – IEEE/ASME Transactions on Mechatronics
Manara, F., Poka, A., Ludovico, D., Pistone, A., De Mari Casareto Dal Verme, L., Canali, C., Berselli, G., & Caldwell, D. G.
(2025). Tendon-driven hyper-redundant manipulators: A review on design solutions. IEEE/ASME Transactions on
Mechatronics, 30(5), 3852–3867. https://doi.org/10.1109/TMECH.2025.3561597 - Journal Article – The International Journal of Advanced Manufacturing Technology (Springer)
Poka, A., Ludovico, D., Manara, F., De Mari Casareto Dal Verme, L., Canali, C., Berselli, G., Caldwell, D. G., & Jovanova,
J. (2025). Underwater snake-like robots: A review on design, actuation, and modelling methods. The International Journal of
Advanced Manufacturing Technology, 139, 5445–5460. https://doi.org/10.1007/s00170-025-16231-1