 Product 5.5
Product 5.5 Soft gripper for fruit monitoring and sorting
Fruits are delicate products. They can bruise easily during picking, packing, and transportation, and even small damage can reduce quality and shelf life. At the same time, checking ripeness is still often done by hand, which takes time and can vary from person to person. The SoftMag system is designed to address these challenges by combining gentle robotic handling with simple, touch-based assessment, so fruits can be picked up safely and checked in a consistent way.
Product Overview
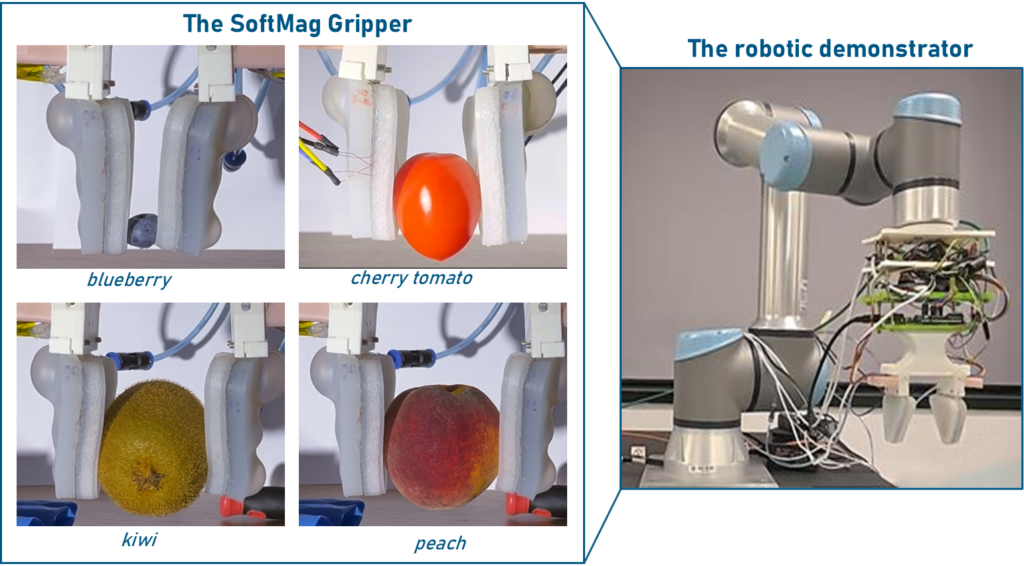
SoftMag is a soft robotic gripper, meaning its fingers are made from compliant materials (and mechanisms) rather than hard metal. This is important because fruits come in many shapes and sizes, and they are easily marked by rigid tools, if not controlled precisely. SoftMag moves using air pressure, so it can wrap around a fruit and hold it with a compliant, cushioned contact. Instead of squeezing a fruit at a few hard points, the gripper spreads contact over a larger area, reducing peak pressure. Example grasps on different fruits are shown in Figure 1.
Beyond gentle grasping, SoftMag can also “feel” what it is touching. Each finger incorporates three-axis tactile sensors, enabling real-time measurement and adjustment of the grasping force to prevent damage as well as incipient slippage of the fruit. In simple terms, it can tell when it has touched an object and how strongly it is pressing. This sensing capability allows the gripper to do more than just pick and place. It can perform a light, controlled press on the fruit surface, like how a person might gently squeeze fruit to judge firmness. Indeed, one of the parameters useful to detect ripeness is firmness, thus the probing action provides useful information for sorting and quality checks.
Vision-Guided Pick–Probe–Place Demonstration
To demonstrate these capabilities, SoftMag is mounted on a UR16e robotic arm and operated in a tabletop workspace. The robotic arm provides repeatability in reaching, allowing the gripper to move smoothly to different locations on the table. Thee robot approaches the fruit, grasps it gently, lifts it, and moves it to position where probing can be performed. The arm then places the fruit into a chosen location, completing a consistent handling cycle.
A key feature enabling flexible operation is vision guidance. The system uses two cameras to observe the workspace from different angles (front and right-side view). This dual-view setup makes it easier to locate fruits on the table, especially when one view is partially blocked or when lighting and reflections reduce visibility from a single viewpoint. With the fruit location estimated from the camera views, the robot can move toward the target without requiring the fruit to be placed at an exact pre-defined position, reducing manual setup and supporting more natural placement variations.
In a typical cycle, the system first identifies the fruit location, then moves the arm to a safe position above the fruit before descending for interaction. Because the gripper is soft, initial contact is forgiving, and the fruit can be secured with gentle closure before lifting. Once the fruit is held stably, the gripper performs a light, controlled press on the fruit surface. The sensors record the response during this press, and firmness-related classification is performed. A full pick–probe–sort demonstration is shown in the video, and tests on kiwi, tangerine, and tomato confirm handling across varied shapes and surface textures while still providing useful probing feedback.
Conclusion
Overall, SoftMag demonstrates how soft robotics and sensing can contribute to gentler and smarter handling of agricultural products. It shows that a robotic system can pick up fruits without harsh gripping and can also collect touch-based information that relates to quality. With vision guidance and a robotic arm, the system can repeat the full cycle of locating, grasping, probing, and sorting in a controlled workspace. This provides a clear and practical illustration of how future automation could support post-harvest inspection and sorting, improve consistency while reducing the risk of damage to delicate products.